
Research
研究紹介
機械学習による無線給電ドローンの経路計画
研究概要
電波を用いて数mから数kmの電力伝送を可能にするマイクロ波電力伝送(Microwave Power Transfer: MPT)の研究が進んでおり、その有望な応用例として飛行中のドローンへの無線給電が注目されています。 図1のように、受電に必要なアンテナや回路などの部品を機体に搭載することで、離着陸することなく充電が可能になります。 ドローンが離着陸せずに長時間のメインミッション(搬送・巡回など)を実行するためには、定期的に無線給電スポットへ移動して充電する必要があります。 仮に充電時間が長すぎると、本来のメインミッションが達成できない可能性があります。一方で充電時間が短すぎると、途中でバッテリー残量がなくなる可能性があります。 また、充電時間に加えて、いつメインミッションを中断して充電するかという充電計画も重要です。
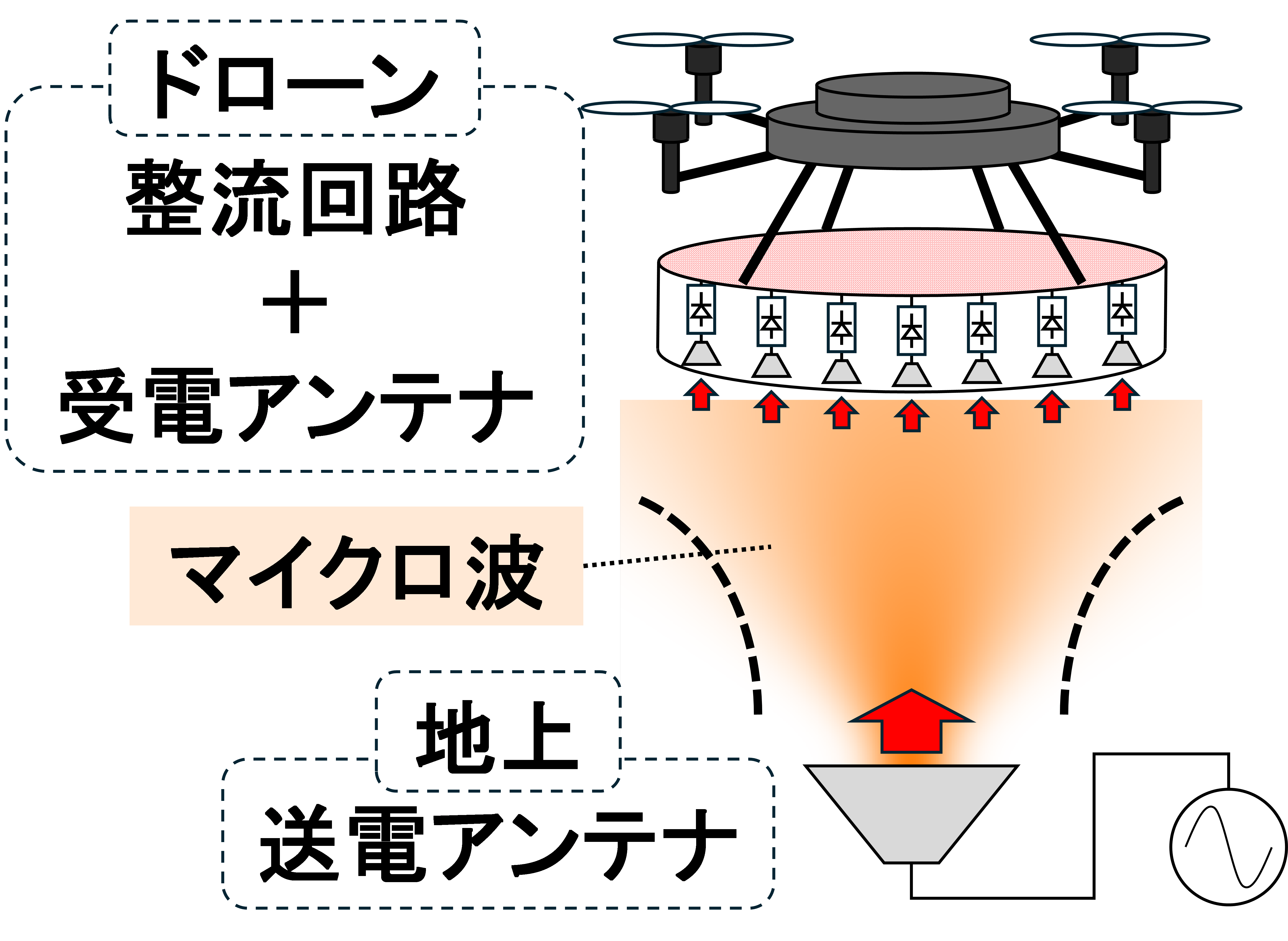
図1:無線給電ドローンの概要
研究内容
本研究室では、機械学習を用いて無線給電ドローンの経路を計画する研究に取り組んでいます。 より具体的には、図2に示す信号時相論理(Signal Temporal Logic: STL)と呼ばれる形式手法を活用して、メインミッションと充電を両立する経路の計画から、その実行可能性の検証までを機械学習で自動化する研究に取り組んでいます。 無線給電ドローンという近未来のアプリケーションに対して、機械学習・制御理論・形式論理・無線通信の知見に基づく手法を組み合わせてアプローチしています。

図2: 信号時相論理(STL:Signal Temporal Logic)



