
Research
研究紹介
月極域の探査に向けた未知環境下での経路計画
研究概要
月の南極・北極付近(以下、月極域)には、水氷などの揮発性物質が存在する可能性が指摘されています。これらの揮発性物質は将来的に資源として利用できることから、世界各国で月極域探査の計画が進められています。日本でも、JAXAがローバによる月極域探査ミッションの検討を進めています(図5)。 月極域において、特に水氷の存在が示唆されているのは永久影領域です。永久影とは、太陽光が一年を通じて全く当たらない領域を指し、深いクレーター内部などがその典型例です(図6)。このような領域は極低温であり、水が凍結したまま保持されるため、揮発性物質が存在する可能性が極めて高いと考えられます。 一方で、永久影では太陽光発電による充電ができないため、ローバの充電率を常に考慮した探査計画が不可欠です。本研究では、揮発性物質探査に向けて、充電率制約下でのローバ経路計画法をJAXAと共同で開発しています。 具体的には、まず揮発性物質を検出するセンサを、確率モデルであるベイジアンネットワークを用いて数理的に表現します。このモデルにより、センサの誤検出や確率変数間の因果関係を考慮できます。次に、このセンサモデルに基づき、充電率などの制約条件に対応可能な経路計画アルゴリズム(例:RRT*)を適用し、永久影内で揮発性物質が存在する領域を効率的に特定する探査手法の確立を目指します。 本研究は、経路計画手法と機械学習を組み合わせた先進的なテーマであり、将来的には実機を用いた探査実験も計画しています。
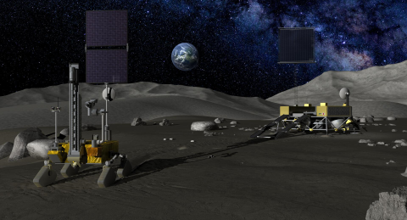
図5. (c) JAXA 月極域探査を表した図
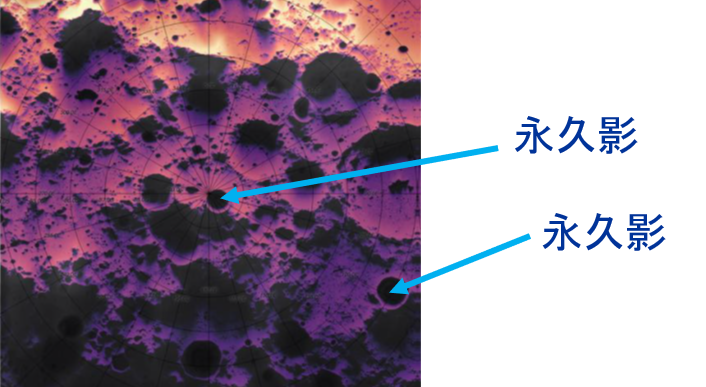
図6. (c) JAXA 月の南極地域における永久影の例



