
Research
研究紹介
未知の危険を瞬時に予測・回避する適応的安全制御
研究概要
自動運転や工場・倉庫での作業自動化等、物理空間で実行される自動化技術の関心と導入は急速に進んでいます。とりわけ、事前に全ての状況を把握することが困難な未知環境においても、自律的に判断・行動できるシステムの実現が求められています。 自動運転やロボットシステムでは、誤った判断が人的・物的被害に直結する恐れがあるため、安全性の確保が最も重要な要件の一つです。一方、未知環境で動作するシステムでは、観測情報の不完全性や環境の不確実性といった要因が、安全な動作の実現を困難にします。加えて、現実の環境は刻々と変化するため、限られた情報から即座に適切な判断を下す迅速な意思決定能力も不可欠であり、安全性と即応性の両立が重要となります。
研究内容
高井研究室ではこのような課題に対応するために、「過去の環境で得た知見を活用して新たな環境に素早く適応する」という発想に基づき、未知環境下での適応型安全制御に関する新たな枠組みを提案しています。最近の研究では、図1に示すように、メタ学習(学習方法自体を学習する機械学習手法)を用いて、安全に関わる「環境間で共有可能な知識」や「効率的な適応戦略」を様々な環境におけるデータを用いて事前に獲得し、新しい未知環境において、迅速かつ安全に行動できる制御アルゴリズムの開発および検証に取り組んでいます。特に、制御バリア関数と呼ばれる、安全領域では正、危険領域では負の値をとる関数をメタ学習する方法を提案し、物理シミュレータによる検証を通して、ビークルシステムの障害物回避問題において、様々な環境に素早く適応して安全性を確保できることを確認しています。
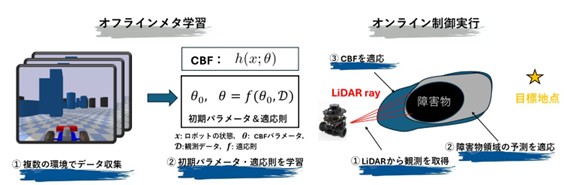
提案手法の概要図
オフラインでの「メタ学習」フェーズ(左)で得た知識を活用し、オンラインでの「制御実行」フェーズ(右)で未知環境に迅速に適応する枠組みを構築している 。オフラインメタ学習では、様々な環境におけるデータをもとに、CBFの初期パラメータおよび、新しく観測データDが得られた際のパラメータの適応則を獲得する。オンライン制御実行では、実行環境中で得られた観測データとオフライン学習で得られた初期パラメータおよび適応則を用いて、素早い適応を実現する。



